 3 lat temu
3 lat temu
Precyzyjnie dobierz roboty do potrzeb Twojego zakładu
Podstawowym kryterium wyboru robota powinno być to, jak bardzo nadaje się do przypisanych mu zadań. W tym kontekście przede wszystkim liczą się dwa parametry: udźwig i zasięg. Dla menedżera produkcji to wskaźniki znacznie ważniejsze niż zużycie energii. Jednak odpowiedni dobór udźwigu i zasięgu robota do jego funkcji może sprawić, iż pojawią się też oszczędności energetyczne. Wśród menedżerów może pojawić się pokusa, by do kierowanych przez nich zakładów wybierać roboty o wyśrubowanych parametrach, czy po prostu duże. Takie podejście daje złudne poczucie, iż robot nie zawiedzie w żadnych warunkach. Może to jednak oznaczać wyższe rachunki za energię. Dlatego właśnie przed zakupem robota należy precyzyjnie określić potrzeby i do nich dopasować konkretne rozwiązanie, konkretny model.
Lekkie roboty zużywają znacznie mniej energii, dlatego warto stosować je do zadań polegających na przenoszeniu lekkich ładunków. jeżeli w danym zakładzie obciążenie pracy robotów jest zmienne, warto zadbać o zakup różnych typów robotów, tak by pojawiającym się sporadycznie zadaniom, wymagającym robotów o większym udźwigu i zasięgu, również można było sprostać. Wówczas rachunki za energię pozostaną na optymalnym poziomie.
Zoptymalizuj warunki pracy robota
Jeśli już w zakładzie podjęto decyzję co do wyboru konkretnego robota czy floty robotów, możemy zatroszczyć się o ograniczenie zużycia energii poprzez odpowiednie zaaranżowanie otoczenia, w którym mają one pracować. W przypadku systemów intralogistycznych, a więc na przykład robotów AMR, sposobem na osiągnięcie tego celu może być zaplanowanie ich tras w taki sposób, by były jak najkrótsze. Można np. usunąć przeszkody na ich drodze albo wykorzystać rozwiązania z obszaru sztucznej inteligencji, które mogą pomóc zaplanować optymalne trasy. W przypadku robotów pracujących stacjonarnie, rozwiązaniem może być takie zaprojektowanie celi, by ruchy ramienia robota były jak najkrótsze.
Umieszczenie robotów w halach półotwartych to kolejny sposób na generowanie oszczędności energetycznych dzięki specjalnemu zaprojektowaniu przestrzeni dla tych maszyn. Obserwujemy rosnące zainteresowanie robotami, które mogą pracować w bardzo niskich temperaturach, bliskich zera. Są to na przykład roboty zbijające palety, których obsługa nie wymaga stałej obecności człowieka. Przestrzenie, w których takie roboty pracują (hale półotwarte) nie są ogrzewane, co pozwala na poczynienie sporych oszczędności na energii.
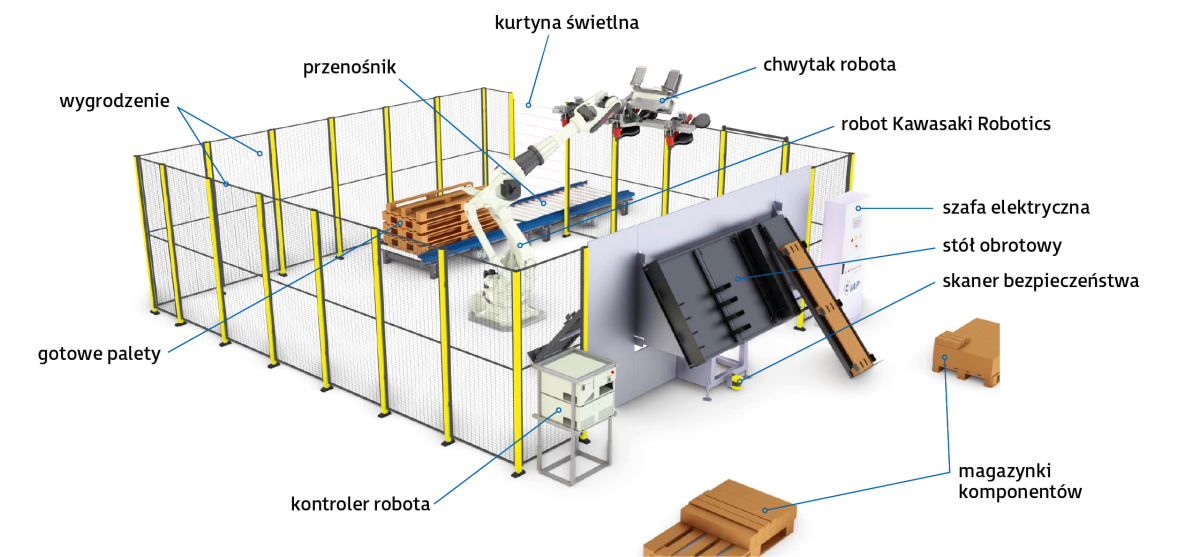 Cela robota paletyzującego
Cela robota paletyzującegoMinimalizuj straty energii dzięki robotom o innowacyjnej konstrukcji
Energooszczędność robotów nie była dotąd specjalnie akcentowana przez producentów tych urządzeń. Są jednak na rynku pewne mniej lub bardziej innowacyjne rozwiązania, które gwarantują większe oszczędności energetyczne od pozostałych. Warto ich poszukać. Przykładem może być seria CP firmy Kawasaki Robotics z kontrolerem E 0.3. Są to roboty, które w procesie paletyzacji przenoszą dość duże ładunki, na przykład worki. W robotach tych zastosowano mechanizm, który pozwala odzyskiwać energię w chwili, gdy ramię wytraca prędkość. Gdy chwytak zatrzymuje się w punkcie, w którym ładunek ma zostać odłożony, robot używa silników do hamowania. W tradycyjnych rozwiązaniach generowana wówczas energia przekazywana jest do rezystorów i jest uwalniana w postaci ciepła. W nowych konstrukcjach, takich jak roboty CP, energia ta jest odzyskiwana i odsyłana do sieci. Roboty serii CP mają udźwig rzędu 180, 300, 500, a choćby 700 kilogramów. Im cięższe towary przenoszą, tym większe oszczędności energetyczne generuje nowy system.
Innowacyjne konstrukcje robotów, zapewniające mniejsze zużycie energii, to też takie, które nie są bezpośrednio inspirowane budową ludzkiego układu mięśniowo-szkieletowego. Tradycyjnie roboty wyposażone są w sześcioosiowe ramiona, wzorowane na ramieniu ludzkim. Przy nieco bardziej precyzyjnym opisie można wyróżnić w nich odpowiednik ramienia, przedramienia, nadgarstka i palców w postaci chwytaka. Taka konstrukcja jest bardzo intuicyjna i funkcjonalna. Człowiekowi jest łatwo zaprogramować takiego robota, bo może bez problemu wyobrazić sobie, jak chwytak powinien się ułożyć, żeby pochwycić konkretny przedmiot. Nie zawsze jest to jednak konstrukcja optymalna z energetycznego punktu widzenia, ponieważ duża liczba części ruchomych oznacza dużą liczbę serwonapędów pobierających prąd. Zredukowanie ich liczby pozwala oszczędzać energię nie tylko dlatego, iż jest mniej aktywnych silników, ale też dlatego, iż przy mniejszej ich liczbie całe urządzenie jest lżejsze. Przykładem takiego odejścia od rozwiązań inspirowanych budową ludzkiego ciała są roboty, w których tradycyjne chwytaki zastępuję się elektromagnetycznymi, przywierającymi do powierzchni przenoszonych przedmiotów.
Mniejsze zużycie energii gwarantują także roboty typu SCARA, czyli takie, których osie przegubów są równoległe. Ruch ramienia w tego typu robotach jest stosunkowo niewielki, konstrukcja jest lekka i przeznaczona do przenoszenia lekkich detali, przez co zużycie energii także jest nieduże.
Innowacyjność konstrukcji, prowadząca do mniejszego zużycia energii może dotyczyć także wykorzystanych materiałów. W wielu typach robotów tradycyjnie stosuje się konstrukcję żeliwną, gwarantującą dużą trwałość. Kiedy jednak robot nie jest przeznaczony do pracy z dużym obciążeniem, można zdecydować się na konstrukcję lżejszą, będąca na przykład połączeniem stali i plastiku. Zgodnie z tą logiką w Kawasaki Robotics powstały roboty delta, których konstrukcja jest bardzo lekka. Służą do przenoszenia bardzo małych detali, do trzech kilogramów, z bardzo dużymi prędkościami. W ich przypadku zużycie energii jest relatywnie niewielkie ze względu na niską wagę samego robota i przenoszonych towarów.
Monitoruj zużycie energii
Czasem przyczyną zwiększonego zużycia energii przez robota może być uszkodzenie jego elementów. Sposobem na sprawdzenie, czy do niego nie doszło, jest stosowanie specjalnego oprogramowania, umożliwiającego monitoring zużycia energii. Oprogramowanie weryfikuje, ile prądu zużywają poszczególne osi robota i w momencie, gdy pobór energii jest znacząco wyższy, sygnalizuje o możliwości przeciążenia czy uszkodzenia. Zwiększony pobór mocy poszczególnych części robota może być na przykład efektem uszkodzonej przekładni, która generuje duże obciążenia. Oprogramowanie pozwala tę przyczynę wykryć i dzięki interwencji serwisowej przywrócić prawidłowy pobór energii. Właściciel czy menedżer zakładu może sam monitorować pracę robotów pod kątem zużycia energii, albo zlecić to firmie zewnętrznej (np. takiej jak ASTOR), która odpowiadała za implementacje robotów w jego organizacji.
Istnieje też oprogramowanie, które pozwala monitorować nie tylko poszczególne roboty, ale całe zrobotyzowane linie produkcyjne i na bieżąco weryfikować koszty zużycia energii. Działa ono na przykład w ten sposób, iż wykrywa ryzyko przekroczenia zadeklarowanego poziomu poboru mocy, a tym samym ryzyko zapłacenia kary, a następnie czasowo wyłącza roboty, które w momencie piku pozostają w stanie spoczynku.


Wyzacz godziny pracy robotów w inteligentny sposób
Rozważnie ustalenie godzin pracy linii robotycznej to jeszcze jeden sposób, pozwalający na generowanie oszczędności energii. Menedżer produkcji, chcący odnieść się do tego problemu, powinien zweryfikować szczegółowe założenia dotyczące taryfy energetycznej zakładu i na przykład, jeżeli jego specyfika na to pozwala, przenieść największą aktywność robotów na godziny nocne.
Aby dobrze dobrać czas pracy robotów, sama aplikacja, która je kontroluje, powinna być tak napisana, by poszczególne maszyny były wyłączane, gdy nie są w użytku. Robot, który jest w spoczynku, wciąż pobiera energię. Jego silniki są włączone i to właśnie one utrzymują ramię robota w bezruchu. Sprawiają, iż moment na wybranych osiach jest przykładany w taki sposób, by ramię pozostawało w bezruchu. Można jednak wyłączyć zasilanie silników i włączyć hamulce mechaniczne. Wtedy poszczególne osie nie pobierają energii, a jej całkowite zużycie spada.
Warto też pamiętać o tym, iż roboty sprawdzają się w zadaniach powtarzalnych, bo ustawienie ich i zaprogramowanie wymaga czasu. Kiedy więc w zakładzie często pojawia się potrzeba przezbrojenia linii produkcyjnej, warto zastanowić się, czy przynajmniej częściowo nie przekazać zadań wykonywanych przez roboty ludziom, a same roboty czasowo wyłączyć, a tym samym ograniczyć zużycie energii.
Sprawdź wirtualnie, zanim się zastosujesz
Czasami trudno jednoznacznie stwierdzić, czy i w jakim stopniu takie a nie inne modyfikacje linii robotycznej przyczynią się do oszczędności energetycznych. W takiej sytuacji może sprawdzić się rozwiązanie polegające na stworzeniu jej wirtualnej kopii – tzw. cyfrowego bliźniaka. Dzięki niemu w wirtualnym środowisku można testować rozmaite scenariusze: zmieniać kolejność robotów na linii produkcyjnej, modyfikować ciężar ładunków przenoszonych przez każdą z maszyn, zmieniać takie parametry jak udźwig, zasięg, testować scenariusze, w których włączane i wyłączane są grupy robotów, testować pracę w różnych godzinach. Po przeprowadzeniu takich testów łatwiej będzie podjąć decyzje dotyczące parametrów pracy robotów w rzeczywistym zakładzie, które przełożą się na rozmaite korzyści, w tym oszczędności energetyczne.
Nie przekraczaj prędkości
Jest jeszcze jeden czynnik, o którym warto pamiętać, gdy myślimy o ograniczeniu zużycia energii przez linię robotyczną – prędkość, a dokładniej przyspieszenie i opóźnienie ruchu ramienia każdej z maszyn. Okazuje się bowiem, iż zmniejszenie przyspieszenia i opóźnienia ramion robotów przemysłowych może ograniczyć pobór energii choćby o 40%. Tak przynajmniej wynika z badań przeprowadzonych przez Chalmers University of Technology w Geteborgu. Może się wydawać, iż gwałtowne ruchy robota pozwalają łatwiej osiągnąć wyśrubowane cele produkcyjne, ale wcale tak nie jest. Roboty, które przyspieszają i hamują płynniej, jak dowodzą badacze, w dłuższym horyzoncie czasowym są równie sprawne, co te poruszające się bardzo energicznie. jeżeli więc aplikacja robota na to pozwala, warto zadbać o skalibrowanie prędkości każdej z maszyn, tak by była jak najbardziej efektywna energetycznie. Warto też zadbać o to, by maszyny pracujące w jednej linii robotycznej były dobrze zsynchronizowane, by sytuacje, w których jeden robot porusza się gwałtownie, a inny czeka (co też wiąże się z poborem energii) należały do rzadkości.
W obliczu kryzysu energetycznego coraz więcej przedsiębiorców, menedżerów zarządzających zakładami produkcyjnymi czy centrami logistycznymi zaczyna myśleć o oszczędzaniu energii. To racjonalne podejście w trudnych czasach, ale korzyści mogą rozłożyć się na lata, także gdy kryzys się skończy. Co ważne, odbije się to nie tylko na kondycji firmowych budżetów, ale też korzystnie wpłynie na środowisko. Energooszczędna zrobotyzowana linia produkcyjna czy logistyczna jest więc inwestycją, która na pewno się zwróci.

Autor:
Wojciech Trojniar, kierownik Działu Marketingu Robotyki
W ASTOR od 2014, początkowo w roli menedżera produktu. Pracuje nad rozwojem sprzedaży robotów Kawasaki Robotics, EPSON, czy Astorino. Jest absolwentem Politechniki Krakowskiej na kierunku Automatyka i Robotyka.








